IrukaTact
Collaboration with Takeshi Oozu
A project from EMP Tsukuba University
Interface: IrukaTact. 08/15
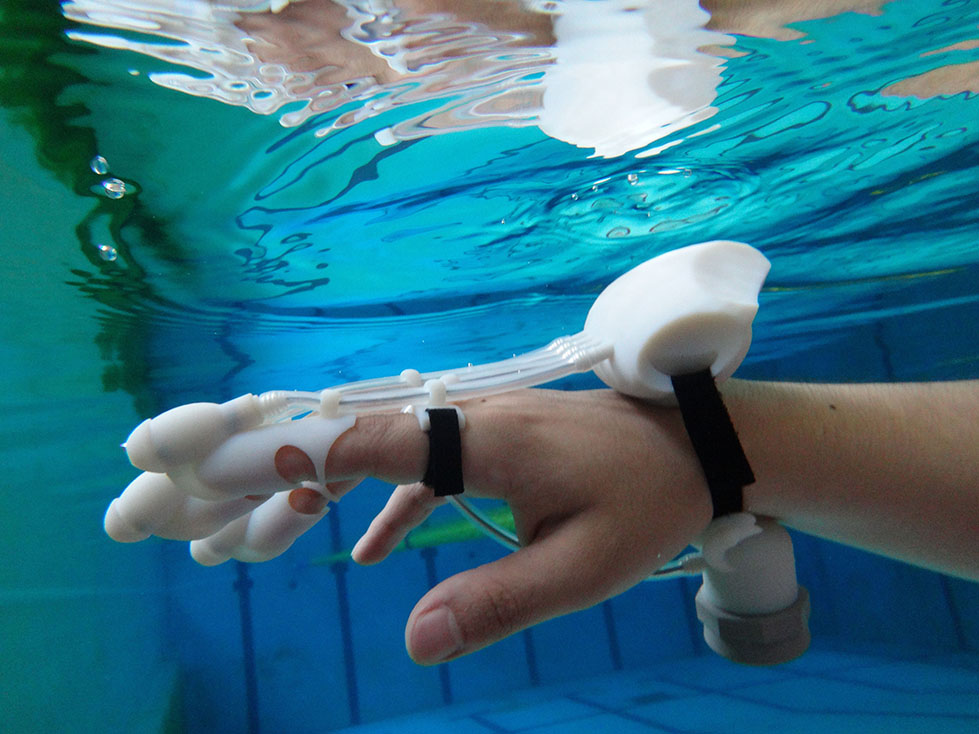
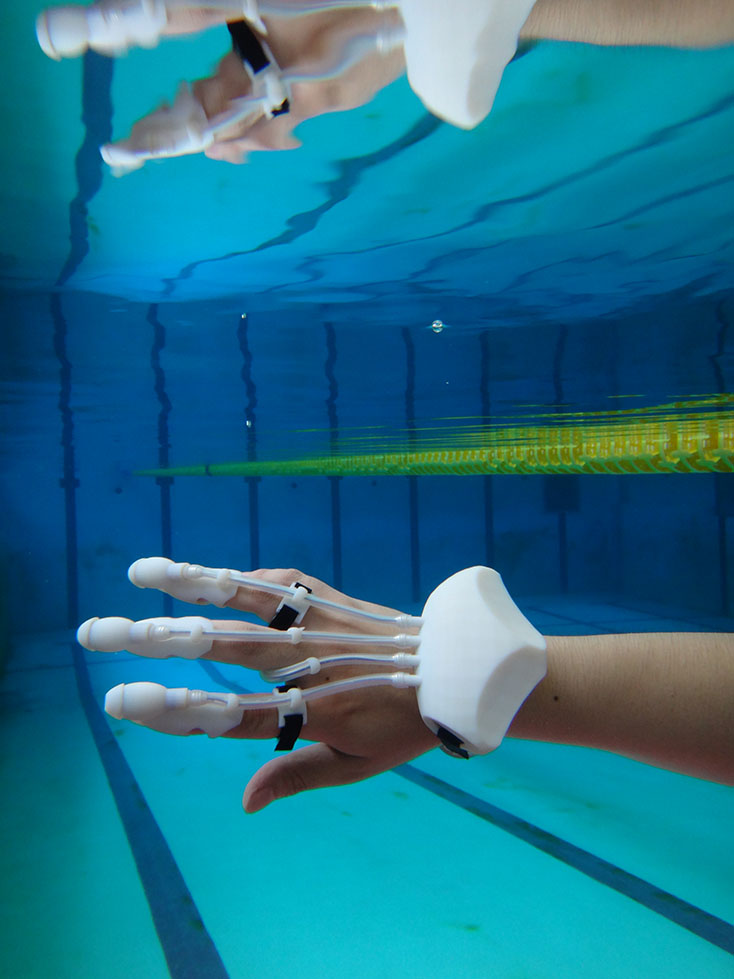
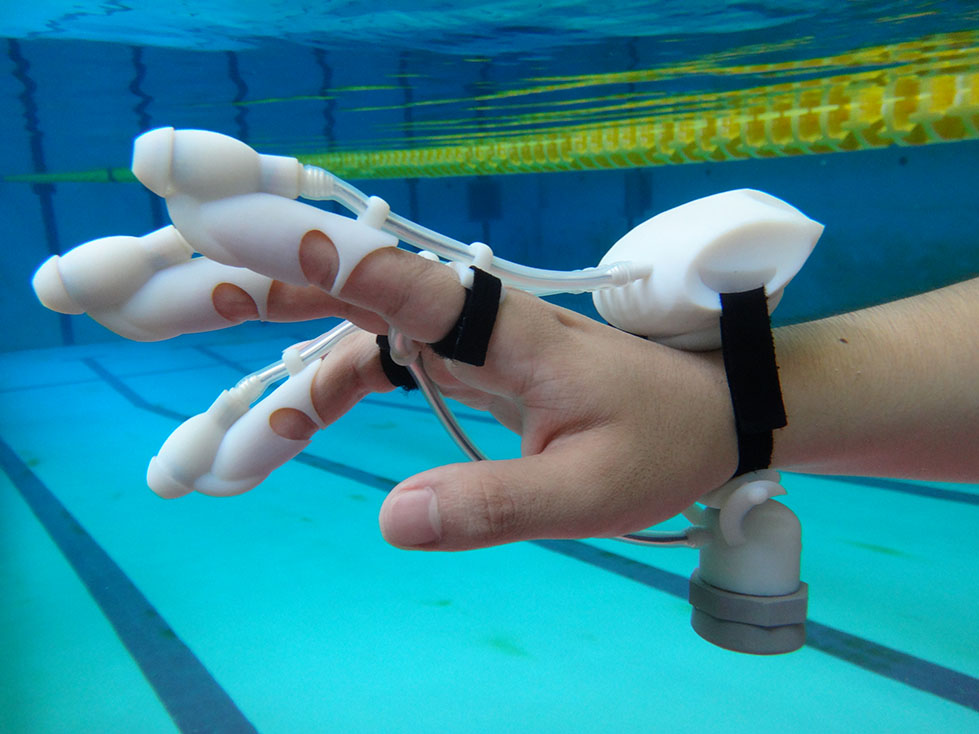
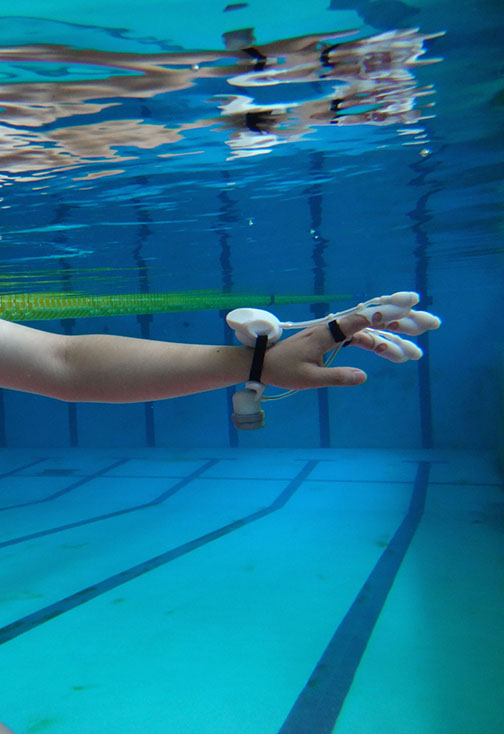
IrukaTact is a submersible haptic search glove that assists the location of sunken objects inspired by dolphin echolocation (Iruka in Japanese).
The system detects the topography of flooded areas with an ultrasonic range finding sonar sensor that sends haptic signals to the wearer’s fingertips. These signals are produced by micropumps which propel water jets onto each digit. The strength of the jets is dependent on the proximity to the object that the wearer is hovering over; the closer the object is to the wearer’s hand, the more pressure they will feel on their fingertips. The glove’s haptic feedback system extends current haptic technologies by providing hybrid actuation including pressure/vibration with limited restriction to the wearer’s natural movement. This technology has multiple application potentials beyond underwater echo-haptic location, including new interfaces for virtual reality such as digital object simulation in aqueous environments.
The IrukaTact search glove is an opensource flooding aid kit with the potential to assist people in emergency situations. It was initially conceived as a novel approach to expanding haptic sensations by using the viscosity of aqueous environments to provide more force feedback than in air while consuming less power. This probe translates ultrasonic range finding data to haptic feedback by mimicking the sonar echolocation method used by dolphins (iruka) to sense their surroundings under limited visibility. It extends the sense of touch to feel the topography of a sunken floor in parallel to the wearer’s hand in order to perceive objects under cloudy waters where sight is no longer useful. This project was developed with the guidance of Ars Electronica's FutureLab to be exhibited as an assistive toolkit at the 2015 Post-City festival.

DIY TOOLKIT
Parts:+Arduino Pro mini 5v
+FTDI cable 5v
+MaxBotix Sonar
+Mini Motors [3x]
+NPN Transistor
+LiPo Battery
+LiPo Charger
+Silicone Tubing
+Rainbow Wiring Cable
+Header Pins
+Velcro
+Motor Waterproofing Grease
+Silicone O-ring
+Crazy Glue
+Hot Glue
+Epoxy Glue
Link: 3D Priniting Design File [Tinker Cad]
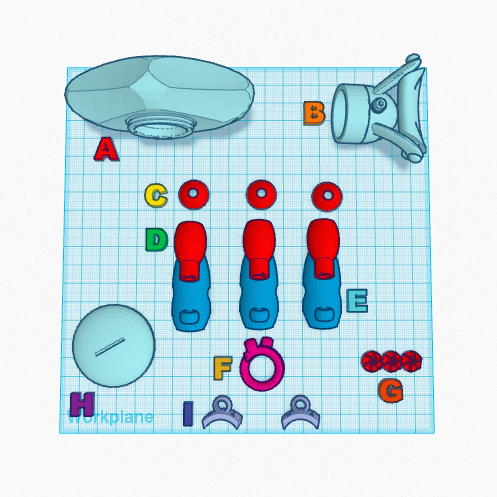
+ [A] Enclosure
+ [B] Sonar Wrist Mount
+ [C] Tip Caps
+ [D] Motor Enclosures
+ [E] Finger Holders **
+ [F] Middle Finger Tube Holder
+ [G] Motor Impellers
+ [H] Enclosure Cap
+ [I] Side Fingers Tube Holders
** Can be resized, and motor holder is locked to ensure motor measurements. Make sure to group all finger parts together after resizing including the channel from the motor holder to the finger holder.
Link: Demo Code + LCD Display [ZIP .ino file]